L7
Full-Size Bipedal Humanoid Robot (NEW)
Increased independent degrees of freedom
Increase control precision
Fully open underlying controls for high playability
Reduce Sim2Real
Tactile sensing
Imitation learning
Supports current loop force control, low damping, and high linearity.
Force Control with Haptic Sensor Feedback
1100 g
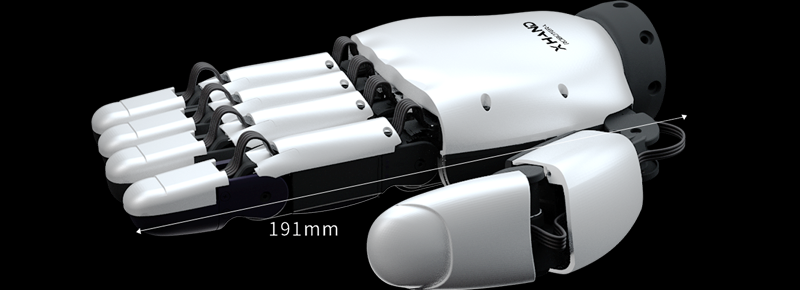
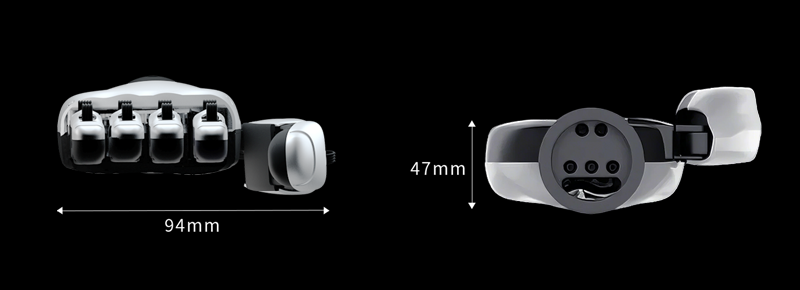
191 mm x 94 mm x 47 mm (相当于成人人手大小)
12
0
拇指 x 3 食指 x 3 中指 x 2 无名指 x 2 小拇指 x 2
3个自研齿轮传动力控关节模组
9个自研齿轮传动力控关节模组
圆润型指尖
-15°~+15°(食指)
±0.20 mm
位控(低阻尼/高阻尼模式)、电流环力控、力位控制
15 N
80 N
16 Kg
25 Kg
小拇指
>2Hz
≤0.1 Nm
270°五指指尖环绕
5个 (五指指尖270°三维环绕触觉阵列传感)
12x10(单指尖270°环绕)x5
三维力感知(包含切向力XY)
83Hz
EtherCAT:100MHz RS485:3MHz
发送端:2088~4896 bytes 接收端:288 bytes
指尖:12x10(单指尖)x5触觉三维阵列传感器 关节:位置,速度,温度,电流(力矩)
关节位置、关节扭矩、关节刚度系数、关节阻尼系数
100万次
-20℃ ~ 60℃
24V ~ 72V
0.15A @48V, 7W
2.5A@48V,120W
RS485(USB), EtherCAT
【1】该数据为灵巧手平放状态下测量的尺寸 【2】该数据为负载状态下测量的数据
1100g
191±1(mm)
94±1(mm)
47±1(mm)
12
0
Thumb x 3
Index Finger x 3
Middle Finger x 2
Ring Finger x 2
Little Finger x 2
gear-driven force-controlled joint module
gear-driven force-controlled joint module
Thumb joints:
Thumb joint 0: 0°90°
Thumb joint 1: -60°90°Thumb joint 2: 0°90°
Four-finger joints:
Four-finger joint 0: 0°110°
Four-finger joint 1: 0°~110°
-15~+15(Index)
16mm
2mm
24V-72V
0.15A @48V, 7W
2.5A@48V,120W
RS485(USB), EtherCAT
15N
8Kg
Little Pinky
>2Hz
0.1Nm
fingertip
5
120x5 (five fingers)
Three-dimensional (including tangential XY forces)
83Hz
Ethercat:100MHz
RS485:3MHz
Up: 2088~4896 bytes
Down: 288 bytes
Fingertips: 120 Three-dimensional profiling array
ForcesJoints: position, velocity, temperature, current (torque)
joint position, joint torque, joint stiffness coefficient, joint damping coefficient
position control (low damping/high damping mode), current-loop force control, force-position control
1,000,000 cycles
-20℃ ~ 60℃
[1] 该数据为灵巧手平放状态下尺寸。
[2] 该数据为灵巧手受垂直朝下的直径为1cm的圆柱压迫时所受到的压力,在不同应用场景中有所差异,请以实际为准。
[3] 以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。
[4] 产品外观后续可能会有升级调整,请以届时实物为准。
[5] 本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。

400 900 8798










 Follow the Official Account
Follow the Official Account Follow the Video Channel
Follow the Video Channel